Гражданская авиация: приборы в кабине - ЦНВ
Цифровой навигационный вычислитель - ЦНВ, предназначен для решения задач навигации...
Цифровой навигационный вычислитель
ЦНВ обеспечивает: программирование маршрута полета и предпосадочного маневра; полет по запрограммированному маршруту; определение в частноортодромической системе координат места летательного аппарата - ЛА; коррекцию счисленных координат и курса ЛА; включение схемы захода на посадку и автоматическое управление предпосадочным маневром; индикацию значений текущих навигационных параметров, выдачу необходимой информации на индикаторы для визуальной ее оценки экипажем; автоматизированную проверку работоспособности ЦНВ и реализацию имитации полета; выдачу сигналов для автоматического управления ЛА в горизонтальной плоскости и выполнения предпосадочного маневра.
В комплект ЦНВ входят:
- бортовая цифровая вычислительная машина (БЦВМ), которая обеспечивает хранение программ вычислений, массивов констант, вводимой исходной и текущей информации, решение навигационных задач в соответствии с заложенной программой;
- пульт ввода и индикации (ПВИ), который осуществляет управление режимами работы, вводом и индикацией навигационных параметров ЦНВ;
- пульт подготовки и контроля (ППК), предназначенный для выбора режимов предполетной подготовки ЦНВ, сигнализации прохождения режимов контроля, определения режимов ввода программы в БЦВМ и контроля всех пультов ЦНВ;
- пульт управления (ПУ), коммутирующий пилотажно-навигационные сигналы на пилотажно-навигационный прибор (ПНП);
- пульт взлета и посадки (ПВП), обеспечивающий автоматическое управление полетом при заходе на посадку;
- блок коммутации (БК), определяющий взаимосвязь всех систем навигационного комплекса, коммутацию каналов информации, формирование предупреждающих, сигнализирующих и управляющих разовых команд;
- блок питания (БП), снабжающий стабилизированным питанием все пульты и блок БК;
- индикатор навигационной обстановки (ИНО), индицирующий место ЛА и навигационные параметры относительно перемещающейся географической карты.
Рассмотрим основные принципы действия и особенности устройства перечисленных блоков, а затем работу ЦНВ
БЦВМ является специализированной цифровой вычислительной машиной ЦВМ20-86К последовательно-параллельной структуры, которая имеет следующие основные технические характеристики: форма представления чисел и команд — шестнадцатиразрядный двоичный код (для чисел используется дополнительный код: 15 значащих разрядов, первый — старший разряд указывает знак плюс — «0», минус — «1»); быстродействие операции в 1 с: сложения — 200 000, умножения — 100 000, деления — 10 000; емкость оперативного запоминающего устройства (ОЗУ) — 1024 шестнадцатиразрядных чисел; емкость постоянного запоминающего устройства (ПЗУ) — 16 384 шестнадцатиразрядных чисел; рабочий цикл — 5 мкс; основная частота — 3,2 мГц; время готовности — не более 3 мин; время непрерывной работы — 15 ч.
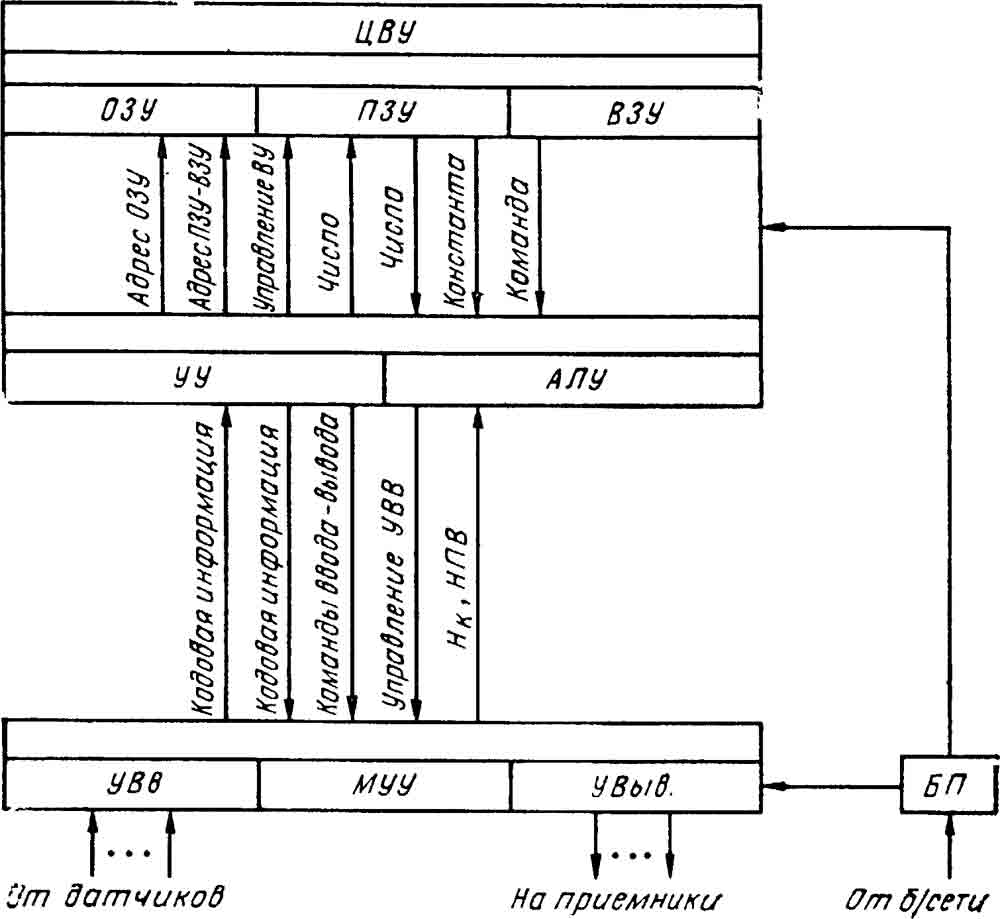
Рис. 1. Упрощенная структурная схема БЦВМ
БЦВМ (рис. 1) делится на три функциональные части: цифровое вычислительное устройство ЦВУ, устройство ввода-вывода УBв и блок питания БП. В свою очередь, ЦВУ включает в себя устройство арифметики и управления УАУ — процессор, состоящий из устройства управления УУ и арифметико-логического устройства АЛУ, и запоминающие устройства ЗУ — оперативное ОЗУ, постоянное ПЗУ и внешнее ВЗУ.
Процессор является программируемым логическим устройством, обеспечивающим обработку и управление данными по определенной программе. Одна составляющая часть процессора АЛУ производит выполнение арифметических операций (сложения, вычитания, умножения и т. д.), логических операций (конъюнкций, дизъюнкций, сравнений и т. д.), операций ввода-вывода и операций управления. Вторая составляющая часть процессора УУ обеспечивает управление обработкой данных в соответствии с заданной программой. УУ последовательно получает команды из ЗУ, расшифровывает каждую из них и формирует необходимые для ее выполнения сигналы. ЗУ предназначено для хранения команд и чисел.
В ОЗУ хранятся промежуточные результаты счета и текущие данные, поступающие от бортовых датчиков. В ПЗУ хранится программа, на основе которой БЦВМ решает навигационные задачи, и константы. В ВЗУ хранятся данные, изменяемые от полета к полету, т. е. в процессе одного полета ВЗУ работает как ПЗУ.
Рассмотрим внутренний обмен информации, происходящий между устройствами ЦВУ при ее обработке. Если АЛУ вырабатывает очередной адрес команды (адрес ПЗУ) и направляет ее в ПЗУ, то последняя, поступив из ПЗУ в УАУ, разбивается на две части. Первая часть — адрес — направляется в ОЗУ (адрес ОЗУ), где происходит выбор числа согласно адресу. Если необходимо выбрать константу, адрес направляется в ПЗУ или ВЗУ. Вторая часть — код операции — дешифруется в АЛУ и в виде сигналов управления используется при выполнении операции. К внешнему обмену информации относится обмен между БЦВМ и бортовым оборудованием, которое осуществляется с помощью УВв. Оно включает в себя устройство ввода УВв, устройство вывода УВыв и местные устройства управления МУУ. Информация от датчиков навигационного комплекса поступает в УВв, где после преобразования в виде кодов (кодовой информации) при наличии соответствующих адресов и сигналов управления (команд ввода-вывода, управление УВв) направляется в УАУ.
Результаты вычислений из УАУ выдаются в УВыв при наличии адреса и сигнала управления, где осуществляется их преобразование в форму, удобную для приемников комплекса. Возможен режим оперативного ввода информации из внешних устройств БЦВМ по сигналу непрограммируемого прерывания вычислений (НПВ).
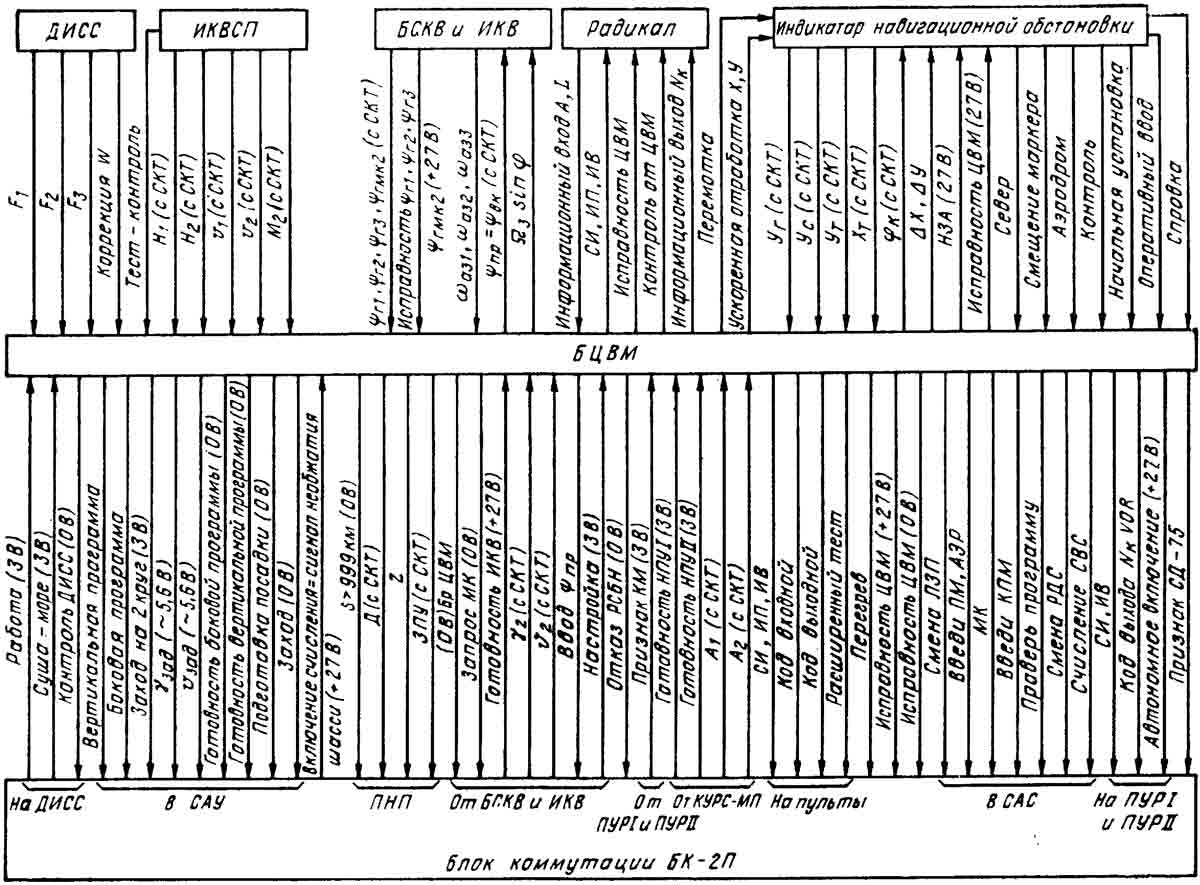
Рис. 2. Схема связи БЦВМ с подсистемами навигационного комплекса
Связь БЦВМ с подсистемами навигационного комплекса приведена на рис. 2, где на линиях связи обозначены команды и сигналы, которыми они обмениваются во время предполетной подготовки и полета.
Определение местоположения ЛА производится в частноортодромической системе координат по данным или путевой скорости, получаемой от ДИСС, или истинной воздушной скорости, получаемой от ИДВСП, а также по информации об углах курса, крена и тангажа, получаемой от ИКВ-72. Вектор путевой скорости Vп формируется на основе доплеровских частот F1, F2, F3, поступающих в БЦВМ, где производится расчет проекций Vп на оси, связанные с частной ортодромией. Величина поправки «Коррекция Vп», определяемая антенной системой ДИСС, вводится в БЦВМ в виде постоянного напряжения. При нормальной работе ДИСС выдает сигнал «работа». При отказе ДИСС цифровой навигационный вычислитель (ЦИВ) переходит в режим «Память», в котором счисление координат производится по значениям истинной воздушной скорости V и запомненным параметрам ветра U и δ в момент отказа ДИСС. Текущие значения проекций скорости ветра на оси частных ортодромий в БЦВМ вычисляются как разности между соответствующими проекциями скоростей, получаемыми от ДИСС и от ИКВСП. В ЦНВ имеется возможность ввода и индикации значений U и δ на пульте ПВИ. Значения истинной воздушной скорости поступают по двум дублированным каналам в виде напряжений V1 и V2 c СКТ. На основе текущего гироскопического курса φг, получаемого от ИКВ, заданного путевого угла частной ортодромии, вычисляемого БЦВМ, и поправки на курс, формируемой БЦВМ с учетом курса начальной выставки, формируется текущий частноортодромический курс, который необходим для решения задач навигации. Начальная выставка курса производится поданным индукционного датчика ИД-6 блока гиромагнитного курса БГМК-6 системы БСДВ. Гиромагнитный курс φфгмк вводится в БЦВМ постоянно и запоминается. Результаты интегрирования проекций Vп на частноортодромические оси в виде координат S и Z индицируются на пульте ввода информации при нажатии на нем кнопки-табло ввода-вывода «Z/S». В БЦВМ решается задача определения координат местоположения ЛА в географических координатах, но они не выводятся на ПВИ, а используются для решения определенных задач и выводятся на ИНО.
В ЦНВ предусмотрена позиционная коррекция местоположения ЛА от радиомаяка с использованием радиосистем или «Курс-МП-70» или СД-75. Для решения задач указанной коррекции в памяти БЦВМ заложены координаты девяти радиомаяков. При полете по сигналу коррекции БЦВМ автоматически выбирает маяк, в зоне которого находится ЛА, определяет его тип. Настроенные на требуемый маяк радиотехнические системы ЛА вырабатывают азимут А и дальность L, которые поступают в БЦВМ. На основании информации о А и L, координат маяка, текущих координат и высот полета ЛА при нажатой кнопке-табло РСБН на ПВИ БЦВМ определяет поправки ΔZ, ΔS к счисленным координатам. Их значение высвечивается на индикаторах параметров ПВИ и по желанию экипажа нажатием кнопки-табло «ИСПОЛ» может вводиться в счисленные координаты. Высота полета ЛА поступает в БЦБМ от ИКВСП по двум дублированным каналам Н1 и Н2 в виде напряжений от СКТ и БЦВМ имеет алгоритм выбора исправного канала. БСКВ обеспечивает ЦНВ информацией о значениях приведенного курса φпр, который корректируется при разворотах на каждый новый ППМ сигналами БЦВМ, вычисленными относительно меридиана начала частноортодромического участка маршрута. Из БЦВМ в БСКВ поступает сигнал широтной поправки 3Ω sinφ одновременно с сигналом «Исправность широтного канала». При отказе БЦВМ потребители получают гирополу компасный курс φгпк, а широтная поправка в ИКВ вводится с пульта управления ПУ-41 БСКВ при переводе последней в режим «ГПК». Сигналы γ и Θ, выдаваемые БСКВ, используются в БЦВМ в алгоритме обработки доплеровских частот.
ЦНВ автоматически реализует навигационную программу, которая определяет последовательность прохождения ЛА всех пунктов маршрута от исходного пункта (ИПМ) до конечного (КПМ), которые определяются номерами Nн и Nк.
В БЦВМ могут быть запрограммированы географические координаты, т. е. φ и 1, 50 пунктов маршрута (ПМ), 9 радиомаяков, 8 аэродромов и 9 зон радиодиспетчерской службы (РДС). Исходные данные могут поступать в ЗУ БЦВМ или автоматически с перфокарт, информация с которых считывается с помощью пульта ППК или вручную с помощью пульта ПВИ и таблицы исходных данных для программирования полета. Выбор конкретного программного маршрута осуществляется ручным вводом в БЦВМ с ПВИ номеров Nн и Nк и номеров соответствующих аэродромов Nна и Nка. В полете можно оперативно менять программу маршрута, вводя вручную новые номера Nн и Nк. Для каждого аэродрома взлета или посадки, кроме географических координат, в память БЦВМ вводятся исходные данные, необходимые для реализации автоматического предпосадочного маневра. Контроль правильности ввода данных с перфокарты осуществляется автоматически и индицируется на ППК сигналами «Сбой» или «Готов». Контроль правильности ввода исходных данных вручную осуществляется визуально по цифровым индикаторам ПВЧ.
В ЦНВ решаются следующие навигационные задачи:
- смена линии заданного пути (ЛЗП), для чего производится в БЦВМ расчет параметров новой частной ортодромии по заданным географическим координатам текущего и предстоящего ППМ, которые вводятся с ПВИ;
- полет по маршруту параллельно заданному при заданном удалении, когда задача полета решается как частный случай управления движением ЛА в боковой плоскости при определенном значении Z и является одним из вариантов оперативного изменения маршрута;
- полет по кратчайшему расстоянию в текущий пункт маршрута;
- выход в заданную точку с заданным путевым углом и упреждением с целью оптимизации предпосадочного маневра;
- решение временных задач, т. е. определение времени прибытия в любой ППМ и КПМ, определение отклонений от временного графика, определение необходимого значения скорости полета;
- предпосадочный маневр, обеспечивающий подход к заданной схеме захода на посадку, заход на посадку и повторный заход, где автоматически решается ряд специализированных задач, не предусматривающих никаких действий экипажа. К их числу относятся следующие: вписывание в одну из частных ортодромий схемы захода; индикация на ПВИ координат ек и ег относительно центра ВПП; выполнение прямоугольного маршрута; изменение параметров прямоугольного маршрута; которое может осуществляться или введением в БЦВМ его величин, заранее с помощью дисковых переключателей пульта ПВП, или немедленным изменением его параметров с ПВП с помощью подачи команд «Разворот», «Запрет разворота», а также с ПВИ командой «Кратчайшее расстояние»; оперативное изменение маршрута подхода; отказ от программного захода или возвращение к программному продолжению захода на посадку; использование схемы захода в качестве зоны ожидания.
Основные пульты ЦНВ обеспечивают автоматический или ручной ввод исходных данных в БЦВМ как перед полетом, так и в процессе полета, включение различных режимов работы ЦНВ, управление индикацией навигационных приборов, включение заданной схемы захода на посадку и автоматическое управление предпосадочным маневром и автоматический контроль исправности всех пультов. Все пульты ЦНВ являются цифровыми приборами, которые обмениваются информацией с БЦВМ. Обмен информацией происходит с помощью последовательного 20-разрядного двоичного кода, где первые четыре разряда используются для кодирования адреса, последующие 16 разрядов — для кодирования информации обмена.

Рис. 3. Пульт подготовки и контроля (ППК):
1 — переключатель режимов работы НВ; 2 — табло сигнализации готовности работы БЦВМ; 3 — табло сигнализации об отсутствии сбоев при вводе программ; 4 — табло сигнализации неправильного считывания исходных данных с перфокарты; 5—табло сигнализации неправильного считывания исходных данных с перфокарты; 6 — выдвижная рамка для размещения перфокарты; 7 — ручка для фиксирования рамки «Карта»; 8 — кнопка-табло для установки рамки в рабочее положение и считывания информации; 9 — табло сигнализации о готовности навигационного комплекса; 10 — кнопка-табло для контроля исправности всех пультов
Пульт подготовки и контроля (ППК) (рис. 3) обеспечивает включение различных режимов предполетной подготовки навигационного вычислителя, автоматический или ручной ввод программ полета, сигнализацию прохождения режимов контроля и автоматический контроль всех пультов. Основным органом управления этого пульта является переключатель 1. Выставив его в положение «Ввод прогр. авт.» или «Ручн.», возможны два режима ввода программ: автоматический с перфокарт или ручной с пульта ввода и индикации. При реализации первого режима нажимается ручка «Вкл.» в направлении стрелки и выдвигается рамка «Карта», куда закладывается перфокарта с исходными данными. Затем нажимается кнопка-табло «Счит.», рамка с перфокартой устанавливаются в исходное положение, и происходит считывание информации. Табло «Сбои» и «Готов» указывают на правильность этого считывания. Окончание автоматического ввода программы определяется по сигнализации табло «Прогр. готов» в положении переключателя «Контр. НК». При положении переключателя «Имитация норм.» или «Ускор.» происходит проверка введенной программы полета и функционирование некоторых навигационных алгоритмов с нормальной и повышенной скоростью.
Пульт ввода и индикации (ПВИ) служит для индикации текущих навигационных параметров, для ввода исходных данных в память БЦВМ при ручном программировании или при оперативном изменении маршрута полета и для реализации решений перечисленных выше навигационных задач.
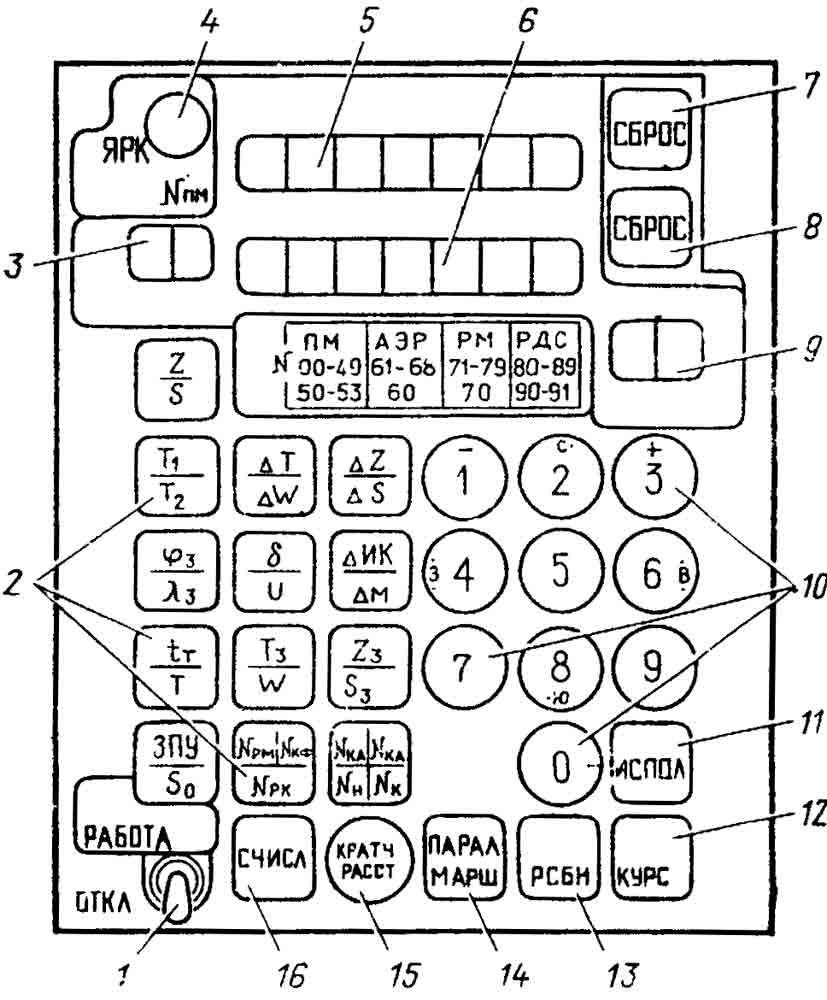
Рис. 4. Пульт ввода и индикации (ПВИ):
1 — переключатель включения алгоритмов полета и ввода исходных данных маршрута в полете; 2 — кнопка-табло ввода и вызова на индикацию навигационных параметров; 3 — двухразрядный индикатор (И1) номера текущего ПМ; 4 — ручка регулировки яркости индикаторов И1...И4; 5. 6 — индикаторы параметров (И2 и И3): 1, 8 — кнопки-табло стирания записанной информации на И2 и И3 соответственно; 9 — двухразрядный индикатор кодов (И4); 10 — кнопки набора чисел (0—9), знаков чисел и признаков стран света (С, Ю, В, 3); 11 — кнопка-табло ввода в БЦВМ набранных значений параметров; 12 — кнопка-табло включения автоматической коррекции курса; 13 — кнопка-табло включения режима определения поправок к частиоортодромнческим координатам ЛА; 14 — кнопка-табло включения маршрута, параллельного ЛЗП; 15 — кнопка-табло включения режима разворота ЛА на заданную точку маршрута от текущего МС; 16 — кнопка-табло для включения и выключения режима «Счисление»
На лицевой панели пульта (рис. 4) расположены: цифровые индикаторы И1...И4; селектор навигационных параметров, включающий тринадцать кнопок-табло с наименованием параметров; наборное поле чисел и знаков чисел; переключатель «Работа—откл.» и кнопки-табло для включения режимов работы. Чтобы вызвать какие-либо данные, необходимо набрать на индикаторе И4 (9) код адреса параметра и нажать одну из кнопок-табло навигационных параметров. Например, для вызова географических координат φ и λ какого-либо пункта маршрута, аэродрома или радиомаяка необходимо на индикаторе И4 набрать номер пункта, а затем нажать кнопку табло φ3 и λ3 Тогда из памяти БЦВМ вызывается и высвечивается на индикаторах И2 и И3 текущая или запрограммированная информация о значениях этих параметров. Причем на И2 высвечивается значение параметра, стоящего над чертой, на И3 — значение параметра, стоящего под чертой. Переключатель «Работа—откл.» служит для включения различных полетных алгоритмов: счисление (кнопка-табло «Счисл.»), параллельный маршрут (кнопка-табло «Парал. марш.»), кратчайший маршрут (кнопка-табло «Кратч. раст.») и т. д.
Пульт взлета и посадки (ПВП) обеспечивает автоматическое управление полетом по заданной схеме захода на посадку. На передней панели ПВП расположены кнопки- табло, имитирующие схему захода ЛА на посадку. Кнопки-табло «2», «3», «4» имитируют начало второго, третьего и четвертого разворотов на схе-. ме предпосадочного маневра, «Тр» — траверз ДПРМ, . «ДПРМ» — дальний приводной радиомаяк, (рис. 5).
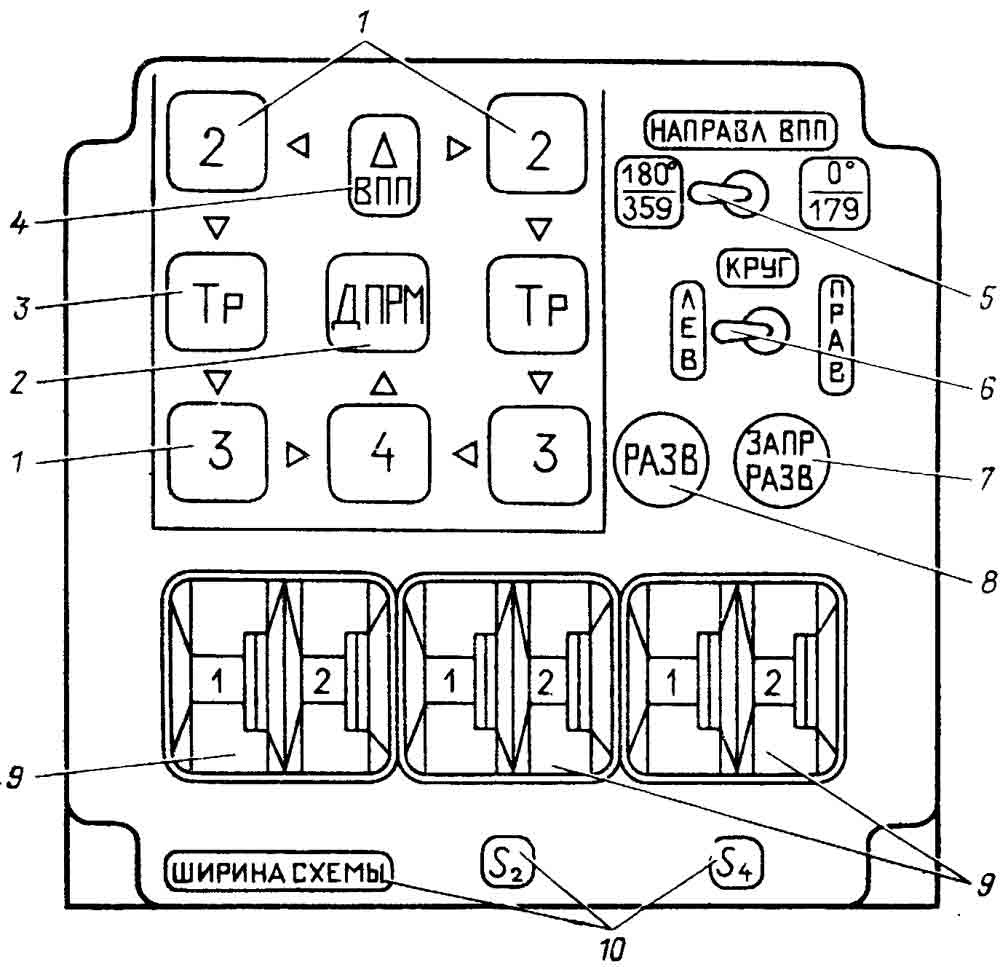
Рис. 5. Пульт взлета и посадки (ПВП):
1 — кнопка-табло сигнализации подхода ЛА к точкам схемы предпосадочного маневра; 2 — кнопка-табло сигнализации подхода ЛА к ДПРМ; 3 — табло сигнализации нахождения ЛА в районе траверза ДПРМ; 4 — табло сигнализации выработки признака «Подготовка посадки»; 5 — переключатель для задания направления ВПП; 6 — переключатель задания правого или левого круга при заходе на посадку; 7 — кнопка включения немедленного разворота ЛА на 90°; 8 — кнопка-табло сигнализации и осуществления запрета разворота и обеспечения продолжения полета в заданном направлении; 9 — переключатели для установки параметров схемы предпосадочного маневра; 10 — табло параметров предпосадочного маневра
При входе в зону аэродрома экипаж получает от диспетчера параметры схемы предпосадочного маневра и точку входа в него, после чего устанавливается на пульте заданный путевой угол переключателем «Направ. ВПП», направление разворота переключателем «Круг» и параметры прямоугольного маршрута предпосадочного маневра. Начало этого маневра происходит включением одной из указанных кнопок по распоряжению диспетчера. Тогда БЦВМ вырабатывает в точке бокового упреждения разворота (БУР) сигнал «Подготовка посадки», по которому загораются стрелки, соответствующие номеру разворота к ВПП. Полет происходит автоматически до четвертого разворота. В точке БУР четвертого разворота БЦВМ вырабатывает признак «Заход» и при наличии сигнала готовности радиотехнической системы посадки управление ЛА переходит к сигналам курсового и глиссадного маяков.
Нажатием кнопок «Запр. разв.» (запрет разворота) и «Разв.» (разворот) можно оперативно изменить заданную программу захода на посадку по прямоугольному маршруту в зоне аэродрома. По первой команде ЛА продолжит полет в направлении текущего участка маршрута. По второй команде ЛА начнет разворот на 90° по или против часовой стрелки, в зависимости от положения переключателя «Круг».
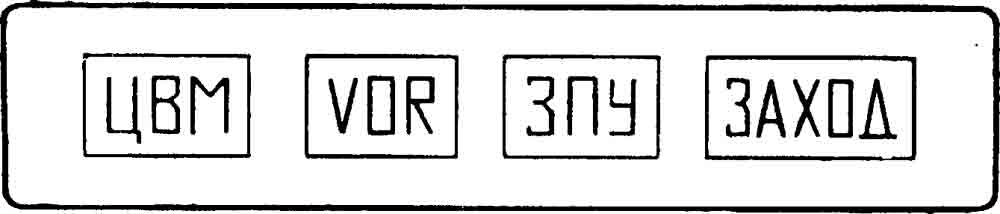
Рис. 6. Пульт управления
Пульт управления (ПУ) предназначен для коммутации пилотажно-навигационных сигналов на ПНП (прибор навигационный плановый). На лицевой панели ПУ 1 расположены кнопки-табло «ЦВМ», «VOR», «Заход» и одно световое табло «ЗПУ» (рис. 6).
Индикатор навигационной обстановки (ИНО) входит в состав ЦНВ и предназначен для индикации ЛА на карте и определения навигационных углов (курса, путевого угла, угла сноса, истинного пеленга ориентира). Кроме того, он позволяет оперативно вводить в БЦВМ координаты пунктов маршрута непосредственно с экрана индикатора, а также визуально контролировать программу выполнения полетного задания в режиме имитации полета. В состав ИНО входят: кассета с микрофильмами, оптическая система, механизм для управления перемещением микрофильма в продольном и поперечном направлениях, механизмы управления поворотом изображения карты, индекса, шкалы углов, указателей путевого угла и истинного пеленга ориентира. ИНО является оптико-электромеханическим прибором, на экране которого изображается проекция перемещающейся аэронавигационной карты местности, предварительно сфотографированной на цветную кинопленку. Кроме того, на экране имеется изображение маркера, имитирующего положения ЛА, и индикация значений навигационных углов. Изображение карты на экране индикатора формируется проекционной оптической системой. Движение проекции карты, имитирующее полет ЛА относительно земной поверхности, осуществляется перемещением микрофильма в продольном направлении. Перемещение проекции карты в поперечном направлении и поворот проекции на какой-либо угол происходит при помощи призмы поворота оптического изображения. На вращающемся экране индикатора нанесены указатель путевого угла и центральный маркер. За экраном вращается стеклянный диск, на котором нанесен указатель истинного пеленга ориентира. Относительно экрана вращаются шкала углов и индекс (рис. 7).
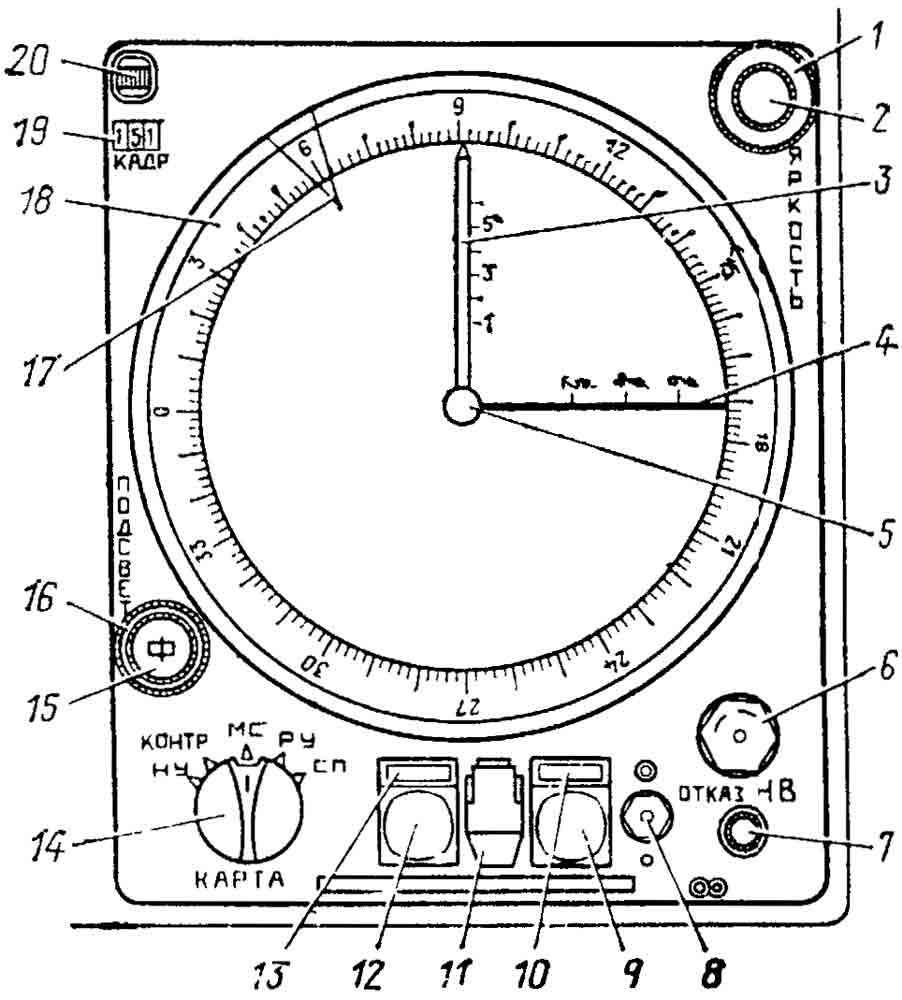
Рис. 7. Индикатор навигационной обстановки:
1 — переключатель для замены отказавшей лампы подсвета; 2 — рукоятка регулировки яркости экрана; 3 — указатель путевого угла ПУ; 4 — указатель истинного пеленга ориентира ИПО; 5 — центральный маркер; 6 — рукоятка ручного управления перемещением и разворотом изображения карты и указателя ИПО; 7 — лампа сигнализации отказа навигационного вычислителя; 8 — переключатель для включения индикации маркера; 9 — кнопка-табло для изменения режима управления указателя ИПО; 10 — табло сигнализации режима автоматического управления; (АУ); 11 — защитная крышка кнопки «Ввод»; 12— кнопка-табло изменения масштаба изображения карты; 13—табло сигнализации нахождения ЛА в зоне аэродрома; 14 — переключатель режимов управления; 15 — рукоятка регулировки резкости; 16 — рукоятка регулировки яркости подсвета табло и кнопок; 17 — отсчетный индекс; 18 — шкала курсов; 19 — счетчик кадров микрофильма; 20 — кнопка-табло включения ориентации карты
Автоматическое управление перемещением изображения и поворотами перечисленных элементов ИНО осуществляется следящими системами по сигналам от БЦВМ. В зависимости от установки ручки переключателя режимов управления ИНО может работать в следующих режимах: «Начальная установка», «Контроль», «Маршрут», «Ручное управление», «Справка», «Оперативный ввод» и «Аэродром».
В режиме «Начальная установка» центр индицируемого кадра совмещается с центром маркера. В режиме «Контроль» происходит проверка точности установки центра кадра внутри центра маркера, так как в этом режиме центр кадра индицируется в виде перекрестья. Если перекрестье не совпадает с центром маркера, то переходят опять в режим «Начальная установка» и изображение карты перемещают до их совпадения.
В режиме «Маршрут» происходит автоматическое перемещение изображения карты, выдача навигационных параметров и индикация места положения ЛА при наличии сигнала «Исправность НВ». При отсутствии этого сигнала высвечивается «Отказ НВ» и движение изображения карты прекращается. Изображение карты в этом режиме можно ориентировать двумя способами: по путевому углу и относительно Севера. Для ориентации карты первым способом необходимо нажать кнопку-табло ориентации до загорания на ней «ПУ».
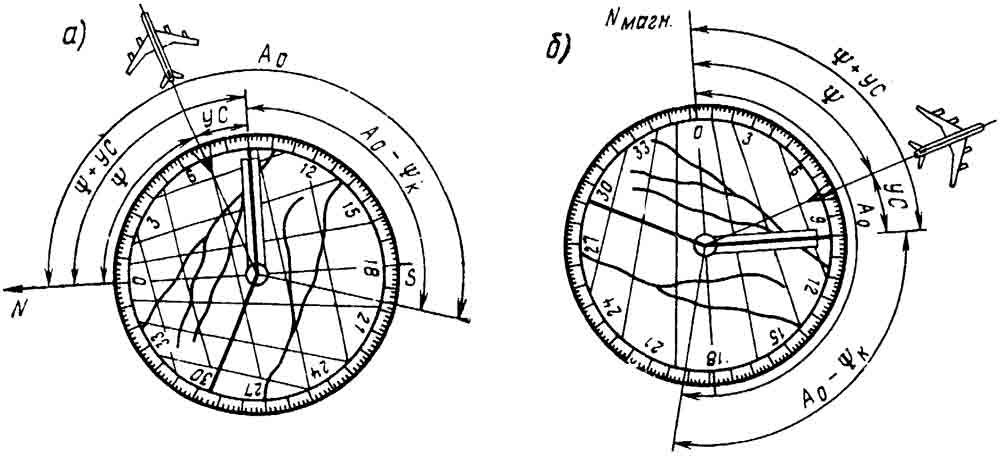
Рис. 8. Примеры ориентации изображения карты на экране ИНО: а — по линии пути: б — на Север
Изображение карты автоматически ориентируется по линии пути (рис. 8). Указатель путевого угла устанавливается вдоль вертикального диаметра экрана ИНО. Изображение карты и шкала курсов разворачиваются так, чтобы значение φ + УС совпадали с указателем путевого угла. Курсовой угол φ определяется углом между нулевой отметкой шкалы и индексом, угол сноса УС — углом между индексом и указателем путевого угла. Для ориентации карты на север необходимо нажимать клавишу-табло ориентации до загорания на ней «С». Изображение карты ориентируется на север, т. е. вдоль вертикального диаметра экрана ИНО. Нулевое деление шкалы также совмещается с ним. Указатель путевого угла устанавливается на угол φ + УС. Положение индекса на шкале определяется значением φ.
Режим «Ручное управление» используется при отказе БЦВМ или при ручном просмотре участка карты.
Режим «Оперативный ввод» позволяет непосредственно с экрана ИНО вводить координаты ППМ или навигационных ориентиров. Режим «Справка» позволяет экипажу индицировать специальные информационные материалы, необходимые для работы с бортовым оборудованием как при подготовке к полету, так и в полете. Кроме указанных режимов в ИНО имеется еще ряд вспомогательных, которые позволяют при входе ЛА в зону аэродрома менять масштаб карты, вручную длительно или кратковременно управлять картой и т. д.
***
Комментариев нет.