ЭВМ в народном хозяйстве СССР
Как в Советском союзе внедрялась компьютерная техника в морском флоте...
На суше и на море
Морское транспортное судно 80-х гг. этого столетия, пожалуй, отличается от своего собрата, построенного 40 лет назад, в большей степени, чем этот последний от парусника середины прошлого века. Механические двигатели избавили моряка от необходимости следовать капризу ветров и течений, но способы управлять судном, его различными агрегатами и механизмами зависели, как и в парусном флоте, от умения и выносливости членов экипажа. Количество матросов, исполняющих различные работы в рейсах, сократилось, и вместо 100, а то и 200 человек, входивших в состав экипажа парусника XVIII—XIX вв., на борту грузового парохода начала XX в. трудилось 40—50 человек, большая часть которых — кочегары — обслуживала топки ненасытных котлов паровой установки, приводящей в движение винт судна. Как и сотни лет назад, в навигационной рубке судна неотрывно следили за горизонтом 2—3 пары глаз, выискивая в туманных просторах океанских путей встречные пароходы или вспышку маяка на опасном рифе. Через каждый час или два менялись на вахте рулевые, даже мускулистые руки крепких матросов уставали крутить тяжелое колесо штурвала, который через примитивный механизм тросовых тяг поворачивал перо руля парохода.
Системы и приборы автоматического управления различными операциями пришли на морской флот так же закономерно, как они появились на иных видах транспорта. Причиной активного внедрения автоматических и электронных регуляторов на торговом флоте послужило стремление максимально сократить экипаж, поскольку рационализация морского судоходства и морской торговли истребили дух романтики в морской профессии и в этой древнейшей отрасли человеческой деятельности наметился дефицит рабочих рук. В наши дни на борту самых больших танкеров и сухогрузов работают не более 25 человек, и эта тенденция сохраняется — уже есть суда океанского плавания с экипажем 15—17 человек.
На первый взгляд это нереально — провести со столь малочисленным экипажем 100-тысячетонное судно через океаны и попасть на погрузку в порт, окруженный опасными отмелями, где к тому же под влиянием притяжения Луны постоянно меняются течения и глубины. Однако сомнения исчезнут при знакомстве с современным судном. Все палубы и отсеки судов густо начинены автоматическими электронными устройствами, управляемыми от бортового компьютера. Микроэлектронная техника решает на флоте многочисленные задачи, которые могут быть условно сведены в три основные группы.
Мореплавание, навигация, связь
Практически все функции морского штурмана выполняет в наши дни судовой компьютер. Хитроумная задача определения места судна на поверхности моря, которая веками составляла одну из «тайн» штурманской профессии, решается в считанные секунды на основе простейшей программы. При этом возможности ЭВМ сдерживаются несовершенством основного источника необходимой для расчетов информации — человека. Поскольку задача поиска места в открытом море решается астрономическими способами, в компьютер нужно ввести данные о высоте светил, определяемой с помощью различного типа секстанов, отсчеты хронометров в момент фиксации высоты каждой навигационной звезды и счислимые координаты судна. Эти величины в обычной практике мореходного искусства определялись штурманом вручную со всеми присущими субъекту ошибками. Но требования к точности конечного результата были столь невелики, что архаичные приемы мореходной астрономии одинаково устраивали судоводителей всех времен и флотов. В принципе мореходная астрономия со всеми формулами и эфемеридами светил заложена в память компьютера и уже не менее двух десятков лет реализуется в навигационных комплексах иностранных и отечественных марок. Однако морская навигация все более теряет свою традиционную связь с естественными светилами и делает ставку на искусственные «радиозвезды». Все новые суда, перевозящие грузы или выполняющие функции геологической или рыборазведки, оборудуются приемоиндикаторами спутниковой навигации. Над Землей постоянно работают в активном режиме несколько цепочек морских спутников, находящихся на геостационарных орбитах с параметрами, позволяющими получить информацию практически круглосуточно и в любой точке океана. Приемоиндикаторы систем космической навигации настраиваются на рабочие частоты соответствующих групп навигационных спутников, принадлежащих различным государственным и частным организациям. Рабочий процесс определения позиции судна в море заключается в решении судовой ЭВМ параллактического треугольника, где опорными точками являются спутники. Достижения микропроцессорной техники позволили объединить радиоприемный комплекс и электронное решающее устройство в одном небольшом блоке, располагающемся непосредственно на рабочем столе штурмана. Точность космической навигации не идет ни в какое сравнение с традиционными способами, включая радионавигационные системы земного базирования. По мере совершенствования судовой приемно-вычислительной аппаратуры и выведения на орбиту дополнительных спутников с необходимыми параметрами точность данных все менее зависит от времени суток и наличия спутника на возвышенных углах сферы. Можно сказать, что система спутниковой навигации является в наши дни наиболее совершенной из всех имеющихся в распоряжении морского штурмана. Ее дисплеи, устанавливаемые на судах, выдают конечные результаты, которые являются сложным синтезом информации, получаемой в виде радиосигналов от спутников и постоянного потока данных от судового гирокомпаса и лага (указатели скорости и направления). Точность определения места, которую обеспечивают последние модели приемоиндикаторов спутниковых систем навигации, исчисляется в долях метра, что намного превышает практический запрос. Наряду с системами спутниковой навигации в судовых условиях успешно используются до сих пор наземные радионавигационные системы типа Декка, Лоран, Омега и прочие приемоиндикаторы. Все системы в основе своей являются простейшими электронно-вычислительными устройствами и на основе анализа радиосигналов двух излучающих станций, работающих в парных цепочках, дают конечный результат в виде параметров графических линий положения или в усовершенствованных моделях — в виде конечных географических координат.
Дальнейшее развитие микропроцессорной техники позволяет передать в руки электронно-вычислительных машин весь цикл управления судном. В этом случае на всем маршруте следования судна через океан заранее выбираются контрольные точки, в которых должна производиться корректировка курса или поворот на новый курс. Удержание судна на назначенном курсе производится обычным авторулевым, в котором электронные автоматы постоянно вводят поправки на ветровой или волновой снос. Сложнее учитывать влияние морских течений, результат воздействия которых может быть выявлен только при сравнении фактической позиции судна с контрольными точками на заранее определенном маршруте.
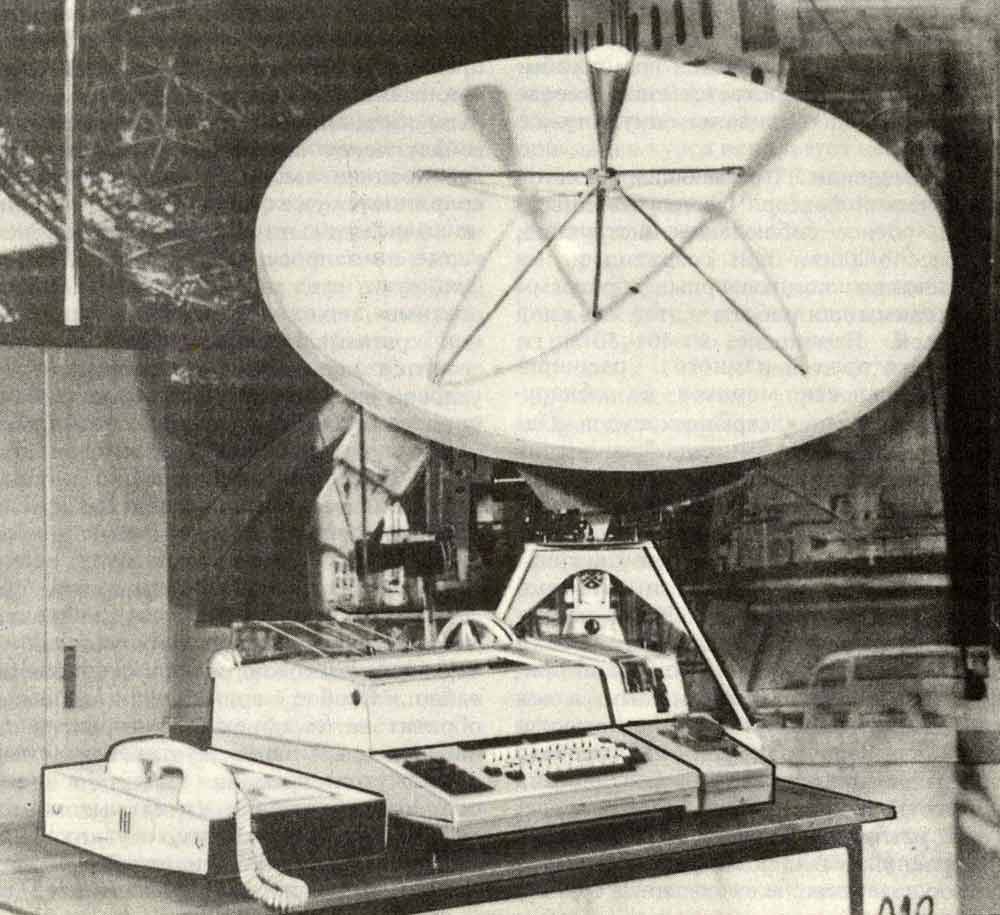
Аппаратура «Стандарт-А» со встроенными микро-ЭВМ обеспечивает надежный прием радиосообщений судами
До внедрения электроники в процесс судовождения этим занимался капитан судна, по нескольку раз в сутки задавая новый курс матросу-рулевому или автоматическому устройству, управляющему рулем судна. В новейших роботизированных навигационных комплексах эту работу выполняет кибернетический капитан. На электронных картах с заданной периодичностью производится сопоставление фактических и контрольных координат, и сигналы коррекции курса поступают на автоматы, управляющие рулем судна. При этом, помимо высвобождения человека от напряженной, но примитивной аналитической работы, достигается другой важный эффект — экономия топлива. Линии пути, по которому ведет судно кибернетический капитан, гораздо ближе к прямой линии, чем ломаная траектория при ручной навигации. Тем самым сокращается длина пути между точками отхода и назначения и экономится время работы двигателя и соответственно уменьшается расход топлива на одну и ту же работу.
В применении ВТ решающим является человеческий фактор. Чувство ответственности, точное соблюдение инструкций, профессионализм при создании и использовании компьютерных программ необходимы для работы с этой сложной техникой. Появление в 40—50-х гг. радиолокаторов намного расширило возможности моряков по обнаружению в тумане встречных судов. Однако обнаружить — еще не значит безопасно разойтись. И суда, оборудованные самыми совершенными для своего времени радиолокационными станциями, продолжали в тумане идти к аварийному сближению, навалам и катастрофическим столкновениям. Экран радиолокатора давал картину «относительного движения», поскольку «свое» судно принималось условно неподвижным, а вся картина окружающей обстановки постоянно двигалась, создавая у наблюдателя превратное представление о фактических курсах соседних судов. Были изобретены различные способы графических построений, выявляющих истинные курс и скорость нескольких соседних судов и степень опасности, которую они представляли для наблюдателя, но... в проливе Ла-Манш на экране РЛС постоянно высвечиваются десятки судов и каждое из них через считанные минуты может оказаться опасным. Простейший компьютер, подключенный к радиолокатору, ввел в сигнал, формирующий изображение, поправку, учитывающую курс и скорость своего судна. Эта маленькая революция в радиолокации значительно изменила взаимоотношения судоводителя с этим сложным прибором. Картина на экране РЛС изменилась, она стала показывать фактическое соотношение курсов и скоростей, приобрела абсолютный характер. Теперь судно, на котором находится наблюдатель, уже не стояло на месте, а вместе со всеми соседними судами двигалось вдоль береговых очертаний, ничем не выделяясь среди соседей. Появилась возможность проще и нагляднее анализировать взаимные перемещения судов, предвидеть возможные изменения курсов, выявлять опасные суда и оценивать обстановку в районах, куда судно войдет через определенное время. Более поздние модели радиолокаторов сопрягаются уже со сложными электронно-вычислительными устройствами, которые по запросу наблюдателя классифицируют суда на «опасные» и «безопасные», исходя из параметра «дистанции кратчайшего сближения», которая вводится капитаном в зависимости от условий видимости. С помощью «электронного щупа» каждое судно, вошедшее в зону радиолокационной видимости, может быть идентифицированно и определены элементы его движения. Если в дальнейшем это судно меняет курс или скорость, наблюдатель будет извещен компьютером об изменении обстоятельств плавания. Форма извещения выбирается в зависимости от условий — звуковой, световой сигнал, надпись на табло. Особое внимание компьютер обратит на те объекты, которые через определенный, заранее устанавливаемый промежуток времени войдут в зону опасного сближения (в открытом море — 2 мили или более, в узких фарватерах, проливах, портовых водах допуск уменьшается в зависимости от скорости судна и размеров акватории для маневрирования). Во избежание риска опасного сближения, компьютер заранее рассчитает оптимальный вариант маневра и покажет его на одном из табло. При этом компьютер обязательно учтет радиус и время поворота судна на новый курс (для крупных морских судов эти величины составляют сотни метров и десятки секунд), а по заданию может учесть и дополнительные факторы риска: наличие сноса от течения, ветра, прилива, проседание на мелководье. Расчетный маневр на расхождение может быть реализован в виде команды на исполнительный механизм — перо руля или регулятор оборотов двигателя. Фактическое завершение задачи расхождения на крупнотоннажных судах доверяется компьютеру уже сегодня в открытом море. В районах интенсивного судоходства решение ЭВМ подвергается в условиях нормальной видимости дополнительному анализу капитаном или лоцманом, что можно объяснить не объективной необходимостью, а скорее традиционной склонностью моряков «считать себя ближе к опасности». При плавании в тумане или в дождь, когда радиолокационная информация является по существу единственно надежной, выводы компьютера, основанные на анализе этой информации, принимаются капитаном или лоцманом к использованию. Моряки, у которых компьютерная грамотность закладывается с самого начала их профессионального обучения, вполне осознанно приходят к выводу, что в современных условиях ошибки самых опытных и предусмотрительных судоводителей имеют большую вероятность и обходятся дороже, чем последствия отказа электронно-вычислительного комплекса, сопряженного с РЛ-станцией.

Возможности компьютерных навигационных установок постоянно расширяются как в плане их надежности, так и по функциональным возможностям. До сих пор подавляющее число морских судов получает информацию о районе плавания с морских карт, достоинства и недостатки которых представляет себе каждый. С появлением в распоряжении судоводителя электронно-вычислительных средств координаты судна, полученные через систему спутниковой навигации, периодически фиксируются на перфоленте.
Для плавания вблизи берега судовой компьютер должен хранить в памяти кроме сетки географических координат массу информации, которую обычно капитан получает из морских карт и лоций. Морская карта прочитана на языке ЭВМ, и вся необходимая информация записана на носителях, которые включаются в работу по мере прохождения судном соответствующих районов плавания. Навигационная обстановка вводится компьютером на экран судовой РЛС в виде отметок глубин, подводных опасностей, очертаний берегов, силуэтов маяков и бакенов и синхронно сопрягается с фактическим изображением этого участка, получаемым при работе РЛС. Английские инженеры разработали модель видеопрокладчика курса, который дает изображение, раскрашенное в 7 цветов. Практически на экране дисплея капитан видит изображение привычной карты, но только для прокладки курса использует не карандаш и линейку, а систему электронных визиров. Масштаб изображения может меняться в зависимости от обстановки в пределах 1:5000—1:500000.
Электронные карты успешно применяются для регулирования движения судов в припортовых акваториях. В заливе Находка с 1981 г. действует автоматизированная система управления движением судов, прибывающих в порты Находка и Восточный. В этой системе электронная карта представляет собой крупномасштабную видеосхему всего залива, на которой выделены условными электронными символами судоходные фарватеры, зоны якорных стоянок, опасные зоны. На эту схему проецируются радиолокационные отметки судов, находящихся в заливе, и центральный компьютер системы определяет, нет ли у судов, движущихся по фарватерам или стоящих на рейде, опасного сноса в сторону мели. Если возникает риск коснуться грунта или столкнуться со встречными судами на форватере, компьютер дает совмещенный свето-звуковой сигнал тревоги и указывает, какие суда в опасности. Дежурный оператор станции управления движением предупреждает по радиотелефону капитанов или лоцманов соответствующих судов о возникновении опасности и дает рекомендации для ее устранения.
Электронно-вычислительная техника используется на морском флоте и для обучения будущих капитанов. Для этой цели во всех крупных портах СССР организованы морские радиолокационные тренажеры на базе автоматизированной навигационной системы «БРИЗ-Е». В тренировочных центрах курсанты морских училищ проходят полный цикл обучения, а капитаны и их помощники периодически осваивают новые методы компьютерного анализа условий плавания. Тренажеры построены по принципу моделирования критических ситуаций на морских дорогах и программируются опытными операторами с учетом различных условий плавания и типов судов.
Обеспечение оптимальной загрузки судов, слежение за грузами, подготовка транспортной документации.
Вопрос, как разместить грузы в трюмах, в наши дни решается с помощью автоматики. Еще до подхода сухогруза или танкера к причалу ЭВМ порта делает предварительный обсчет карго-плана (грузового плана) для конкретного судна с учетом всех характеристик грузов, размеров грузовых помещений на судне, требований сохранения прочности его корпуса в самых экстремальных условиях и предстоящей последовательности выгрузки в различных портах. На нефтеналивном танкере такой план после его проверки на судовой ЭВМ и утверждении капитаном становится программой для автоматизированного процесса загрузки. Судовая ЭВМ используется для управления грузовыми операциями и дает команду открыть клапаны на трубопроводах, по которым жидкий груз начинает поступать в отсеки танкера из береговых накопительных емкостей. По мере заполнения грузовых танков сигнальные датчики сообщают объем и температуру принимаемого груза. Эта информация обрабатывается на ЭВМ с учетом нормативов остойчивости и прочности корпуса танкера. В нужный момент компьютер дает команду о переключении потока груза в другой танк, а затем и о полном прекращении погрузки. К этому времени вычислительное устройство судна печатает на телексном аппарате отчетный документ. Подобная информационно-управляющая система широко используется на ряде крупнотоннажных танкеров и балкеров, что позволило сократить обслуживающий персонал и повысить надежность определения количества груза и его правильного размещения в отсеках танкера.
Для судов-контейнеровозов ЭВМ производит аналогичный расчет, принимая во внимание различный вес сотен и даже тысяч стандартных контейнеров, которые необходимо перевести в различные порты и для различных получателей. Затраты ручного труда на такую работу составили бы много дней для целой группы операторов. Электроника выдает готовые карто-планы за считанные часы, а затем в течение рейса производит их регулярную корректировку для оптимального распределения контейнеров на борту судна по мере их выгрузки в портах и приеме порожних на борт.
Незаменима роль вычислительной техники для современных контейнерных терминалов в портах. При одновременном хранении на площадках терминала десятков тысяч груженых и порожних контейнеров только быстродействующему электронно-вычислительному устройству под силу произвести поиск партии контейнеров, предназначенных для погрузки на определенное судно, и определить порядок их подвоза для укладки на контейнеровоз.
Если контейнер при перевозке или р погрузке получает повреждение, информация об этом вводится в память системы, которая найдет владельца контейнера и сообщит его представителю, что необходим ремонт.
Автоматизация контроля за работой судовых механизмов и диагностика их неисправностей.
По мере сокращения штатов в судовых экипажах происходило все большее проникновение электронно-решающих устройств в машинные отделения судов. На автоматизированных судах по команде электронного оператора производится периодический контроль десятков и сотен параметров работы многих механизмов и агрегатов. При отклонении от нормы дается сигнал в помещение, где находится вахтенный персонал судна, с указанием характера неисправности. Если дефект продолжает развиваться, следящая электронная система производит автоматическое переключение неисправного механизма на дублирующий, а при необходимости отключает ряд агрегатов, нормальная работа которых невозможна без вышедшего из строя механизма или прибора.
Созданы электронные системы диагностики судовых двигателей. В программу их работы заложены рекомендации заводов, которые строят и монтируют на судне те или иные механизмы и агрегаты. Такие системы значительно расширяют возможность оперативного поиска причин отказов и устранения неисправностей в судовых условиях.
В. Поляков
1986 год
Комментариев нет.